


Comment augmenter le couple ou la vitesse d'un moteur pas à pas avec Arduino (alimentation, moteur, Arduino) ?
Dans l'automatisation industrielle, la robotique et d'autres applications de contrôle de précision, les moteurs pas à pas sont appréciés pour leurs capacités de positionnement de haute précision. Cependant, le couple et la vitesse d'un moteur pas à pas sont souvent limités par sa conception et son mode de commande. Avec Arduino, nous pouvons contrôler le moteur pas à pas de manière flexible et essayer d'augmenter son couple ou sa vitesse grâce à certaines stratégies.
Connaissance de base des moteurs pas à pas
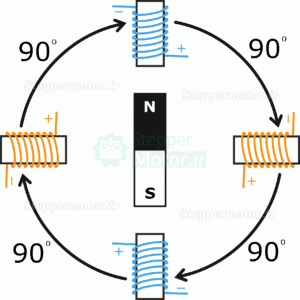
Le moteur pas à pas est un composant de commande en boucle ouverte qui transforme un signal d'impulsions électriques en déplacement angulaire ou linéaire. Il contrôle la vitesse et l'accélération du moteur en fonction de la fréquence des impulsions, et contrôle le déplacement angulaire grâce au nombre d'impulsions envoyées.
Connexion du moteur pas à pas à l'Arduino
Premièrement, vous aurez besoin d'un pilote de moteur pas à pas, tel que l'A4988 ou le DRV8825, qui recevra les signaux numériques de l'Arduino et les transformera en courant et tension nécessaires au moteur.
Connectez les quatre fils du moteur pas à pas (généralement A+, A-, B+, B-) aux ports correspondants du pilote.
Connectez les fils de contrôle du pilote (par exemple DIR, STEP, ENABLE) aux broches numériques de l'Arduino.
Alimentez le pilote avec une tension appropriée, généralement élevée (comme 12V ou 24V), car le moteur pas à pas nécessite un courant élevé pour produire un couple.
Stratégies pour augmenter le couple
Augmenter la tension: Le couple du moteur pas à pas est proportionnel au courant du moteur. Par conséquent, en augmentant la tension fournie au moteur pas à pas, nous pouvons augmenter le courant du moteur, ce qui permet d'augmenter le couple. Mais cela doit être fait dans les limites du moteur pour éviter des dommages.
Réduction par division: Les pilotes de moteur pas à pas peuvent souvent être configurés pour réduire chaque pas en plusieurs micro-pas. En augmentant la division, nous pouvons faire que le moteur se déplace sur une plus petite distance à chaque pas, ce qui permet d'augmenter la précision de positionnement et le couple.
Utiliser un réducteur: Installer un réducteur entre le moteur pas à pas et l'organe d'exécution final peut augmenter le couple. Mais cela réduira également la vitesse du moteur.
Stratégies pour augmenter la vitesse
Augmenter la fréquence des impulsions: La vitesse du moteur pas à pas est proportionnelle à la fréquence des impulsions. Par conséquent, en augmentant la fréquence des impulsions envoyées par l'Arduino au pilote de moteur pas à pas, nous pouvons augmenter la vitesse du moteur. Mais cela doit être fait dans les limites de vitesse nominales du moteur pour éviter une surchauffe ou des dommages.
Optimiser le code: Optimiser le code Arduino pour réduire les délais et interruptions inutiles peut améliorer la réactivité du moteur pas à pas.
Utiliser un pilote à grande vitesse: Certains pilotes de moteur pas à pas avancés peuvent gérer des fréquences d'impulsion plus élevées, ce qui permet d'accélérer la vitesse du moteur.
Remarques
Lorsque vous ajustez la tension et la vitesse du moteur pas à pas, veillez toujours à consulter les spécifications du moteur pour respecter ses limites de fonctionnement.
Pour les applications nécessitant une longue durée de fonctionnement, assurez-vous que le moteur pas à pas dispose d'une bonne dissipation de chaleur pour éviter une surchauffe.
Lorsque vous utilisez un réducteur, faites attention à la précision et à la lubrification du réducteur pour garantir un transmission régulière et fiable.
En conclusion, grâce à la combinaison d'Arduino et du pilote de moteur pas à pas, nous pouvons contrôler le couple de manière flexible.