


Différence entre les moteurs pas à pas biphasés et les moteurs pas à pas quinphasés
2 phases, 5 phases, quelle est la différence ?
Il existe deux différences principales entre les moteurs pas à pas biphasés et les moteurs pas à pas quinphasés. La première est d'ordre mécanique. Un moteur pas à pas se compose essentiellement de deux parties : le stator et le rotor. Le rotor se compose de trois parties : la coupelle 1, la coupelle 2 et les aimants permanents. Les moteurs à 2 phases ont un stator composé de 8 pôles avec de petites dents, tandis que les moteurs à 5 phases ont un stator composé de 10 pôles. Chaque pôle du stator est équipé d'un enroulement.
La deuxième différence entre les moteurs biphasés et les moteurs quinphasés est le nombre de phases ; les moteurs biphasés ont deux phases, la phase « A » et la phase « B », tandis que les moteurs quinphasés ont cinq phases. Essentiellement, le nombre de phases fait référence aux différentes combinaisons de pôles qui sont alimentés en séquence pour attirer le rotor.
Comment ces différences affectent-elles les performances ? Les performances d'un moteur pas à pas dépendent d'un certain nombre de facteurs. Il existe de nombreuses façons de piloter un moteur pas à pas, et la méthode de pilotage a un impact significatif sur les performances du moteur. L'entraînement par forme d'onde, le pas complet, le demi-pas et le micro-pas sont les méthodes d'entraînement les plus courantes, et les performances de chacune d'entre elles varient considérablement. Sans tenir compte des différentes méthodes d'entraînement, voici les principaux domaines de performance des moteurs pas à pas à 2 phases et à 5 phases.
Résolution
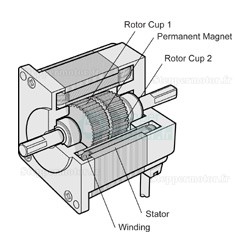
Figure 1 Structure du moteur pas à pas
Sur le plan structurel, les moteurs pas à pas à 5 phases ne sont pas très différents des moteurs à 2 phases. Les deux moteurs ont un rotor de 50 dents. La différence réside dans le fait qu'un moteur à 5 phases possède 10 pôles, 2 par phase, et qu'il suffit de déplacer le rotor d'un dixième de dent pour l'aligner sur la phase suivante. Dans un moteur à 2 phases, le rotor doit se déplacer d'un quart de pas de dent pour s'aligner sur la phase suivante (8 pôles, 4 par phase).
Cela donne un moteur à 2 phases avec des pas de 1,8° par 200 tours et un moteur à 5 phases avec des pas de 0,72° par 500 tours. Lorsqu'ils sont utilisés avec un pilote à micropas, les moteurs à 5 phases peuvent effectuer des pas aussi petits que 0,00288°, mais la précision de position et la répétabilité dépendent toujours de la précision mécanique des moteurs. Les moteurs à 2 phases et les moteurs à 5 phases ont tous deux une précision mécanique de ± 3 minutes d'arc (0,05°).
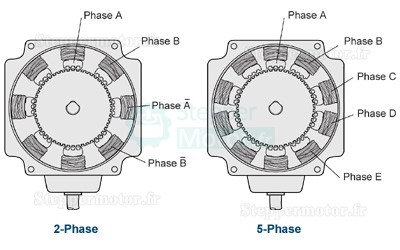
Figure 2 Différence entre les enroulements des moteurs pas à pas à 2 phases et à 5 phases
Vibrations
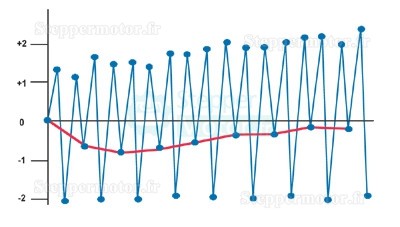
Comme le moteur pas à pas à 5 phases a un angle de pas plus petit (0,72° contre 1,8° pour le moteur à 2 phases), le moteur à 5 phases a beaucoup moins de vibrations que le moteur à 2 phases. Le graphique de droite montre les vibrations produites par un moteur à 5 phases par rapport à un moteur pas à pas à 2 phases. Comme vous pouvez le constater, le moteur biphasé produit beaucoup plus de vibrations.
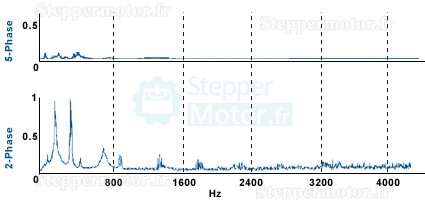
Figure 3 Comparaison des vibrations produites par des moteurs pas à pas biphasés et quinphasés
*Les graphiques du haut représentent le micropas à 5 000 pas par révolution. Ces graphiques ont été créés en connectant un générateur à un moteur à deux axes. Lorsque le moteur vibre, la tension générée est tracée. Plus le moteur vibre, plus la tension générée est importante.
Couple
Bien qu'il y ait peu de différence entre le couple de sortie d'un moteur pas à pas à 2 phases et celui d'un moteur pas à pas à 5 phases, le moteur à 5 phases a plus de couple « utilisable ». Cela est principalement dû à la différence de fluctuation du couple produite par les deux moteurs.
Le demi-pas ou le micro-pas d'un moteur pas à pas à 5 phases peut en fait augmenter le couple jusqu'à 10 %, car davantage de phases sont alimentées. Un moteur biphasé perd jusqu'à 40 % de son couple pendant le demi-pas et le micro-pas, mais de nombreux variateurs biphasés compensent cette perte en surmultipliant le vecteur de couple opposé.
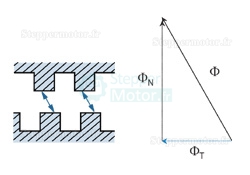
La mise sous tension du stator crée un électro-aimant qui attire le flux magnétique du rotor. Le flux magnétique peut être divisé en deux vecteurs, un vecteur normal et un vecteur tangentiel. Le couple n'est généré qu'en présence d'une composante tangentielle. La figure ci-dessous illustre la présence d'un flux tangentiel.
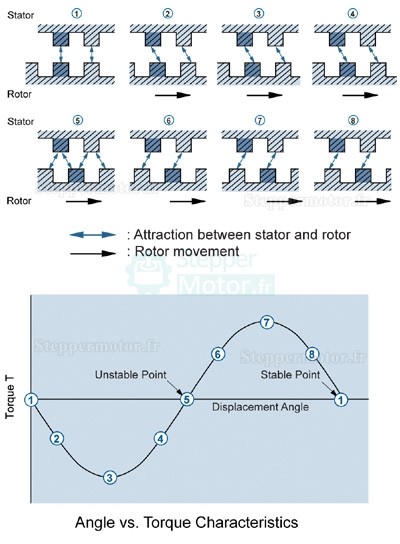
Dans la figure 1 ci-dessous, les dents du rotor sont directement alignées sur celles du stator et le flux n'a qu'une composante normale, de sorte qu'aucun couple n'est généré. Lorsque les dents du rotor sont désalignées par rapport aux dents du stator dans les figures 2, 3 et 4 ci-dessous, le moteur produit un couple. Ce couple est appelé couple négatif car il tente de ramener les dents dans une position stable. Dans la figure 5 ci-dessous, le flux est uniformément réparti entre les dents du stator, de sorte qu'aucun couple n'est produit. Dans les figures 6, 7 et 8 ci-dessous, un couple positif est généré lorsque les dents du rotor en quinconce se déplacent pour s'aligner sur la dent suivante du stator. Enfin, les dents du rotor sont directement alignées sur les dents suivantes du stator (figure 1 ci-dessous).
Chaque phase du moteur contribue par une courbe sinusoïdale de déplacement du couple (illustrée ci-dessous) au couple de sortie total du moteur. La différence entre les valeurs maximales et minimales est appelée fluctuation de couple. Les fluctuations de couple provoquent des vibrations, donc plus la différence est grande, plus les vibrations sont importantes.
Étant donné que le couple total du moteur se compose d'un plus grand nombre de phases, la fluctuation du couple d'un moteur à 5 phases est considérablement réduite par rapport à un moteur à 2 phases, où la différence entre les valeurs de crête et de creux peut atteindre 29 %, contre environ 5 % pour un moteur à 5 phases. Les fluctuations de couple étant une conséquence directe des vibrations, les moteurs à 5 phases fonctionnent plus en douceur que les moteurs à 2 phases.
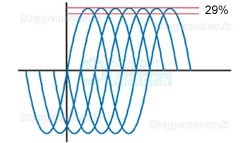
Décalage du couple d'un moteur pas à pas biphasé
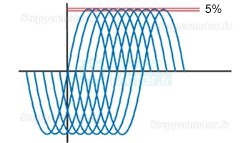
Déplacement du couple d'un moteur pas à pas à 5 phases
Précision/répétitivité
La précision se compose de deux éléments : électrique et mécanique. Les erreurs électriques sont dues au déséquilibre des phases. Par exemple, la résistance du bobinage du moteur est spécifiée à ± 10 %, de sorte que, bien que le moteur ait une puissance nominale de 10 W, une phase peut avoir une puissance de 9,2 W et l'autre phase une puissance de 10,6 W. Cette différence entre les phases fait que le rotor favorise une phase par rapport à l'autre.
Les erreurs mécaniques sont dues à plusieurs facteurs, dont la forme des dents n'est pas le moindre. Bien que les dents d'un moteur soient censées être carrées, le processus d'emboutissage et le vieillissement des matrices peuvent entraîner l'arrondissement de certaines dents ou parties de dents. Lorsque les dents s'arrondissent, le flux magnétique ne circule pas directement, mais plutôt ailleurs. Ces facteurs affectent donc la précision du moteur.
Avec un entraînement à pas complet, un moteur biphasé répète son état tous les 4 pas et un moteur quinphasé répète son état tous les 10 pas. Tous les 4 pas pour les moteurs biphasés et tous les 10 pas pour les moteurs quinphasés éliminent les erreurs électriques causées par le déséquilibre des phases, ne laissant que les erreurs mécaniques.
Une fois que le moteur a effectué une rotation de 360°, les mêmes dents sont alignées au point de départ, ce qui élimine les erreurs mécaniques.
Synchronisation
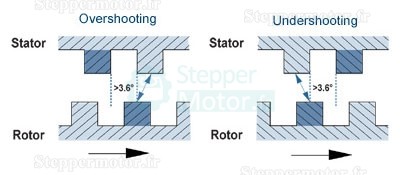
Étant donné qu'un moteur pas à pas à 5 phases ne se déplace que de 0,72° par pas, il est pratiquement impossible qu'un moteur à 5 phases manque un pas en raison d'un dépassement ou d'un sous-dépassement. Lorsque les dents du rotor ne sont pas alignées avec les dents correctes du stator, le moteur perd sa synchronisation ou manque un pas. Quelles sont les causes d'un mauvais alignement des dents ? Tout d'abord, pour qu'une dent du rotor ne soit pas correctement alignée, il faut que l'autre dent soit déjà alignée là où elle devrait l'être. Pour que cela se produise, le rotor doit être à plus de 3,6° (au-dessus de la bonne dent du stator) ou à moins de 3,6° (pas assez loin pour s'aligner sur la bonne dent du stator). Pourquoi 3,6° ? Les dents du rotor étant magnétiquement attirées, les dents correctes doivent être situées à plus de la moitié de la distance entre les dents du stator pour être alignées (7,2° divisé par 2 entre les dents du rotor donne 3,6°). Par conséquent, lorsque le rotor dépasse la bonne dent du stator de plus de 3,6°, la dent suivante s'aligne à sa place, ce qui permet de sauter une étape. Inversement, si le rotor ne se déplace pas de plus de 3,6°, les dents actuelles du rotor resteront alignées sur les dents du stator et le rotor ne tournera pas, ce qui signifie que vous avez sauté une étape.
Modes d'entraînement
Il existe plusieurs méthodes d'entraînement pour les moteurs pas à pas biphasés et quinphasés. Voici un bref aperçu des concepts d'entraînement pas à pas complet et micropas.
Système pas à pas complet à 2 phases (1,8°/pas)
Le système pas à pas complet à 2 phases alimente les phases A et B et commute entre les pôles positifs et négatifs pour produire une rotation.

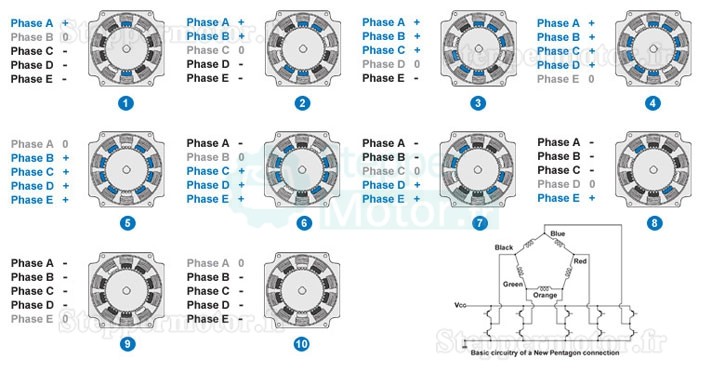
Système pas à pas complet à 5 phases (excitation pentagonale à 4 phases) (0,72°/pas)
Le système d'excitation à 4 phases est unique aux moteurs à 5 phases et permet un fonctionnement plus stable.
Micropasage
Les variateurs à micropas divisent l'angle de pas de base du moteur en diminuant progressivement le courant dans une phase tout en augmentant le courant dans la phase suivante. Il en résulte un pas de moteur plus petit. Avec un variateur à micropas, le pas de base du moteur peut être divisé en pas plus petits allant de 1/1 à 1/250.
L'illustration de droite montre le concept de base du micropas.
Figure 1 ci-dessous - Le courant de la phase A est de 100 %, le rotor est donc directement aligné.
Figure 2 ci-dessous - Le flux de courant vers la phase A est réduit à 75 % et 25 % du courant va maintenant à la phase B.
Figure 3 ci-dessous - Le courant dans la phase A et la phase B est de 50 %, le rotor est donc directement aligné au milieu des deux phases.
Figure 4 ci-dessous - La phase A est maintenant à 25 % et la phase B à 75 %, le rotor se rapproche donc de la phase B.
Figure 5 ci-dessous - La phase A est désactivée et la phase B est à 100 %, de sorte que le rotor se retrouve directement aligné sur la phase B.

Dans cet exemple, le micropas du moteur fait passer les 500 pas par tour d'un moteur pas à pas à 5 phases à 2 500 pas par tour en les divisant par cinq. La résolution du moteur est désormais de 0,144°.
Le micropas n'offre pas seulement une résolution plus élevée, mais garantit également un fonctionnement plus souple, moins de vibrations et moins de bruit que les autres entraînements.
Conclusion
En fonction de votre application spécifique, un moteur à 2 phases peut être suffisant. Toutefois, les moteurs pas à pas à 5 phases offrent une meilleure résolution, moins de vibrations, des taux d'accélération et de décélération plus élevés (en raison d'angles de pas plus petits) et sont moins sujets à la perte de synchronisation due à des dépassements ou à des sous-dépassements que les moteurs pas à pas à 2 phases. Pour les applications nécessitant une grande précision, peu de bruit et peu de vibrations, la technologie à 5 phases est la meilleure.