


Comment adapter les solénoïdes et les moteurs pas à pas aux applications industrielles?
Les applications de périphériques telles que les systèmes de contrôle en usine, l'automobile et les équipements de laboratoire utilisent de plus en plus les capacités de l'Internet des objets (IoT) et de l'intelligence artificielle (IA) pour une prise de décision à faible latence, des performances accrues, des coûts réduits, ainsi qu'une sécurité et une productivité accrues. Les pilotes de solénoïdes et de moteurs pas à pas doivent évoluer avec leur temps pour inclure davantage de capteurs embarqués et de fonctions intelligentes pour l'intégration dans le nouvel environnement en évolution rapide afin d'améliorer encore la précision, la fiabilité, le contrôle en boucle fermée, le coût, l'encombrement et la facilité d'utilisation.
Ce document résume le fonctionnement de base des solénoïdes et des moteurs pas à pas et souligne les avantages des circuits intégrés de commande conçus pour les applications intelligentes. Il décrit et explique ensuite comment démarrer une conception à l'aide d'exemples de pilotes d'Analog Devices.
Solénoïdes et moteurs pas à pas : similaires mais différents
Les solénoïdes et les moteurs pas à pas convertissent le courant électrique en mouvement physique au moyen d'une bobine enroulée qui agit comme un électro-aimant. Malgré leurs différences d'aspect et de fonction, les caractéristiques communes des bobines permettent dans certains cas d'utiliser le même circuit intégré de commande pour les deux actionneurs.
Les solénoïdes sont des composants relativement simples qui produisent un mouvement mécanique linéaire en appliquant un courant. Ces composants comportent une bobine électrique enroulée autour d'un tube cylindrique et un actionneur ferromagnétique (également appelé plongeur ou armature) dans la position du noyau vide, qui est libre de se déplacer à l'intérieur de la bobine (figure 1, à gauche).
En revanche, les moteurs pas à pas utilisent plusieurs bobines de stator disposées de manière circulaire autour du corps du moteur (figure 1, à droite). Le rotor du moteur contient également un ensemble d'aimants permanents.
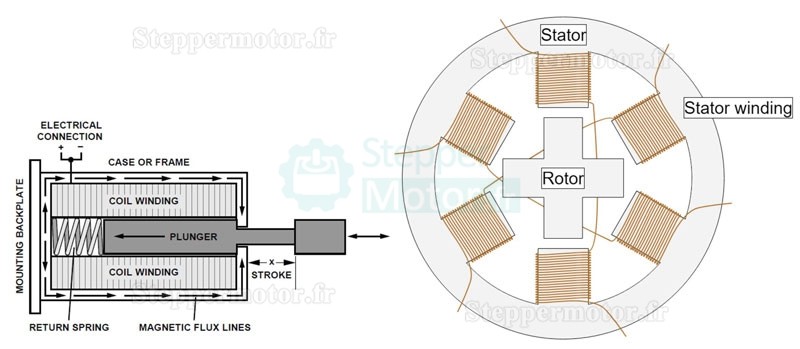
Figure 1 : la construction d'un solénoïde consiste en une bobine enroulée avec un piston coulissant interne (à gauche) ; un moteur pas à pas est plus complexe, avec des aimants permanents sur le rotor et des bobines électromagnétiques sur le stator (à droite).
Dans le cas des solénoïdes, le mouvement du plongeur résulte d'un seul « coup de poing » qui se produit lorsque le courant est appliqué, ce qui amène le plongeur à sa position limite. Après une coupure de courant, la plupart des solénoïdes utilisent un ressort pour ramener le plongeur dans une position dite de repos.
Dans le schéma de commande le plus basique, le solénoïde est contrôlé par une impulsion de courant claire de marche et d'arrêt. Bien que cette méthode soit simple et directe, elle présente un certain nombre d'inconvénients, notamment une force d'impact élevée, des vibrations importantes, un bruit acoustique et électrique élevé, un faible rendement électrique et peu de contrôle sur le mouvement ou le retour du plongeur.
Lorsque les bobines du stator sont mises sous tension de manière séquentielle, le champ magnétique rotatif qui en résulte tire sur les aimants de l'armature, ce qui fait que le moteur pas à pas commence à tourner. En contrôlant la synchronisation, le rotor du moteur pas à pas peut tourner en continu, s'arrêter ou s'inverser.
Contrairement aux solénoïdes, qui n'ont pas besoin d'être synchronisés, les bobines du stator doivent être alimentées de manière séquentielle et en séquence, et répondre à des exigences caractéristiques telles qu'une largeur d'impulsion correcte.
Les entraînements intelligents dépassent les limites pour améliorer les performances
En contrôlant soigneusement le courant qui alimente les solénoïdes et les bobines des moteurs pas à pas, y compris la forme du profil de l'onde, les pentes ascendantes et descendantes et d'autres paramètres, les variateurs intelligents peuvent offrir un certain nombre d'avantages, notamment
- Amélioration de la fluidité des mouvements et de la rotation, minimisant le broutage
- Réduction des vibrations et des chocs, en particulier pour les solénoïdes
- Positionnement plus précis des mouvements de démarrage, d'arrêt et d'inversion des moteurs pas à pas
- Stabilité des performances pour s'adapter aux conditions de charge transitoires ou variables
- Amélioration de l'efficacité
- Réduction de l'usure physique
- Réduction des bruits acoustiques et électriques.
- Interfaces faciles avec les processeurs de supervision, ce qui est essentiel pour les installations IoT.
Le MAX22200 d'Analog Devices est un pilote de solénoïde et de moteur intégré, contrôlé en série, qui démontre ce qu'un pilote de précision signifie pour les solénoïdes (figure 2). Les huit pilotes en demi-pont de 1 A de ce circuit intégré de 36 V peuvent être connectés en parallèle pour doubler le courant de commande ou configurés comme un pont complet pour commander jusqu'à quatre vannes à verrouillage (également connues sous le nom de vannes bistables).
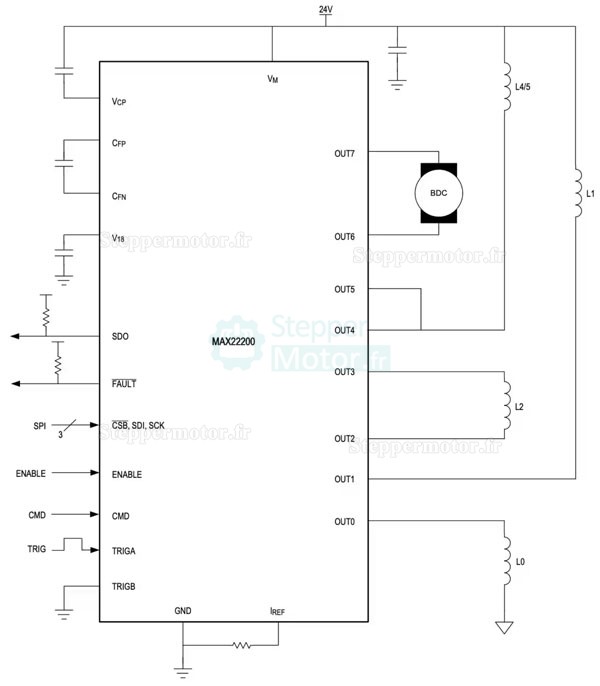
Le MAX22200 de Devices est un pilote de solénoïde et de moteur intégré, contrôlé en série, avec huit pilotes en demi-pont qui peuvent être disposés dans différentes configurations.
Le pilote supporte deux méthodes de contrôle : la régulation par tension (VDR) et la régulation par courant (CDR). Avec la régulation pilotée par la tension (VDR), le dispositif délivre une tension modulée en largeur d'impulsion (PWM) avec un rapport cyclique programmable par l'intermédiaire de l'interface SPI. Pour une tension d'alimentation et une résistance de solénoïde données, le courant de sortie est proportionnel au rapport cyclique programmé. La régulation pilotée par le courant est une forme de contrôle en boucle fermée dans laquelle un circuit intégré de détection de courant sans perte détecte le courant et le compare à un courant de référence programmable en interne.
Contrairement aux drivers à source de courant simple, le MAX22200 peut être adapté pour répondre aux besoins de la distribution de courant. Pour optimiser la gestion de la puissance dans les applications d'entraînement de solénoïdes, le courant d'entraînement d'excitation (IHIT), le courant d'entraînement de maintien (IHOLD) et le temps d'entraînement d'excitation (tHIT) peuvent être configurés individuellement pour chaque canal. En outre, il offre une variété de fonctions de protection et de défaillance, notamment:
- Protection contre les surintensités (OCP)
- Détection de charge ouverte (OL)
- Arrêt thermique (TSD)
- Verrouillage en cas de sous-tension (UVLO)
- Vérification de la détection du mouvement du piston (DPM)
Les quatre premiers points sont des caractéristiques standard bien connues ; le DPM nécessite une explication plus détaillée. Par exemple, dans une vanne commandée par un solénoïde, si la vanne fonctionne normalement lorsque le solénoïde est activé, la distribution du courant n'est pas monotone (figure 3, courbe noire). Au lieu de cela, il y a une chute de courant influencée par la force électromotrice inverse (BEMF) générée par le mouvement du plongeur (figure 3, courbe bleue).
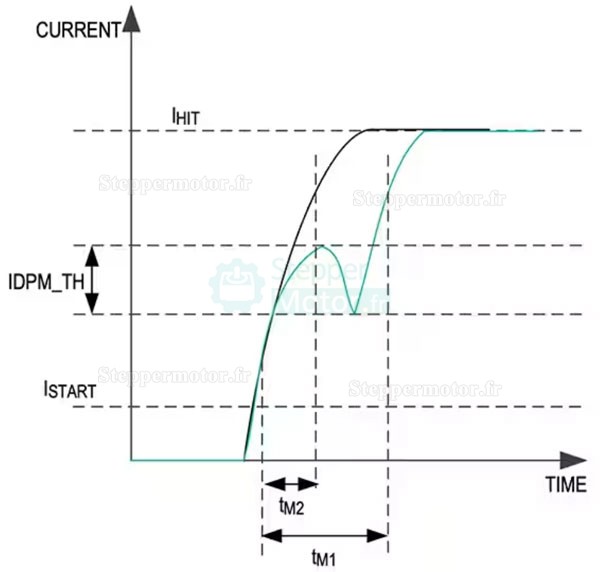
Lorsqu'il est utilisé pour les solénoïdes, le MAX22200 peut détecter si un solénoïde ou une vanne est bloqué(e) en déterminant la chute de courant de commande BEMF attendue par rapport au seuil (IDPM_TH) lorsque le solénoïde est entraîné du courant de démarrage (ISTART) au courant d'entraînement d'excitation final (IHIT).
Lorsqu'elle est configurée et utilisée pour les solénoïdes, la fonction DPM du MAX22200 détecte la présence d'une chute de BEMF pendant la phase d'excitation. Si aucune chute n'est détectée, une indication est placée sur la broche FAULT et dans le registre de défaut interne.
Les kits d'évaluation simplifient le processus
Afin d'étudier les performances du système dans des conditions de charge et de demandes statiques et dynamiques variables, Analog Devices propose la carte d'évaluation MAX22200EVKIT# de gestion de l'alimentation commandée par solénoïde pour le MAX22200 (figure 4). Ce kit d'évaluation (EVK) prend en charge le contrôle en série du MAX22200 et la surveillance des défauts via l'interface USB-SPI intégrée et le microcontrôleur MAX32625. Il comprend une interface utilisateur graphique (GUI) compatible avec Windows pour exécuter les fonctions du circuit intégré MAX22200, ce qui en fait un système d'évaluation complet sur PC.

La carte d'évaluation MAX22200's MAX22200EVKIT# Solenoid Controlled Power Management Evaluation Board permet de tester entièrement le circuit intégré et ses charges à l'aide d'une interface utilisateur graphique basée sur Windows.
Cette carte entièrement assemblée et testée peut être configurée pour les solénoïdes côté HT/côté HT et peut également être utilisée pour les vannes de verrouillage (généralement commandées par des solénoïdes) ou les moteurs CC à balais.
Moteurs pas à pas : une plus grande liberté de contrôle
Les moteurs pas à pas sont plus complexes que les solénoïdes et ont des exigences de contrôle plus élevées. C'est ce que montre le TMC5240 d'Analog Devices (figure 5), un contrôleur de moteur pas à pas intégré et très performant, doté d'interfaces de communication série (SPI, UART) et d'un riche système de diagnostic avec algorithmes intégrés.
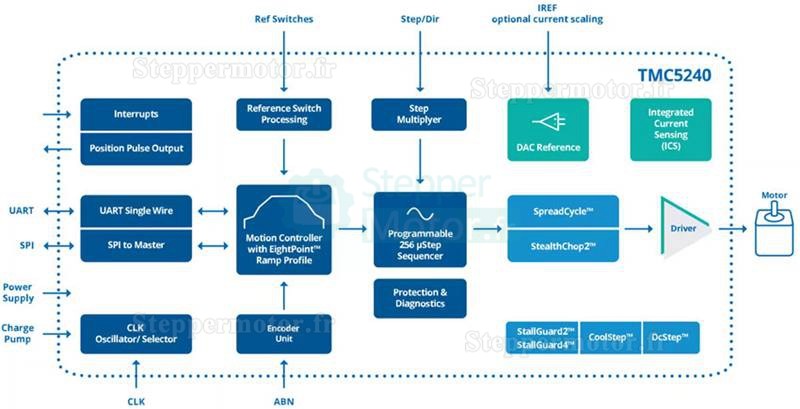
Figure 5 : Les algorithmes sophistiqués intégrés dans le contrôleur et circuit d'attaque de moteur pas à pas haute performance TMC5240 aident les solénoïdes et les moteurs pas à pas à atteindre des performances optimales.
Le circuit intégré comprend un générateur de rampe flexible à huit points qui minimise les à-coups lors du positionnement automatique de la cible. L'à-coup est le taux de variation de l'accélération, et un à-coup trop important peut entraîner de nombreux problèmes de système et de performance. Le pilote de moteur pas à pas intègre un pont en H de 36 V, 3 A avec une résistance à l'enclenchement de 0,23 Ω et une détection de courant intégrée non dissipative (ICS). Le TMC5240 est disponible dans un petit boîtier TQFN32 de 5 × 5 mm et dans un boîtier TSSOP38 optimisé thermiquement de 9,7 × 4,4 mm avec des pastilles exposées.
Le TMC5240 possède des caractéristiques avancées uniques qui permettent d'obtenir une plus grande précision et d'assurer un rendement énergétique élevé, une grande fiabilité, un mouvement fluide et un fonctionnement à basse température. Ces caractéristiques sont les suivantes:
- StealthChop2 : algorithmes de hachage haute précision et silencieux pour un mouvement et un arrêt silencieux du moteur, ce qui permet une accélération et une décélération plus rapides du moteur par rapport au StealthChop plus simple.
- SpreadCycle : contrôle du courant cycle par cycle de haute précision pour un mouvement le plus dynamique possible.
- StallGuard2 : détection de décrochage sans capteur et mesure de la charge mécanique pour SpreadCycle
- StallGuard4 : détection de décrochage sans capteur et mesure de la charge mécanique pour StealthChop
- CoolStep : ajuste le courant du moteur avec les mesures de StallGuard pour maximiser l'efficacité et minimiser la production de chaleur dans les moteurs et les entraînements.
L'utilisateur peut prérégler ces fonctions et les appeler pendant le cycle de fonctionnement du moteur. En outre, le couple peut être contrôlé en combinaison avec l'accélération pour obtenir une accélération et une décélération efficaces et douces tout en atteignant les valeurs souhaitées.
Par exemple, une combinaison de trois segments d'accélération et de décélération peut être utilisée de deux manières : pour utiliser des valeurs d'accélération plus élevées à des vitesses plus faibles afin de s'adapter à la courbe de couple du moteur, ou pour réduire les à-coups lors de la transition d'un segment d'accélération au suivant. Pour ces deux types de situations, le contrôleur TMC5240, avec son générateur de profil de mouvement à huit points, permet des transitions de mode en douceur en maintenant des segments de vitesse constante alors que la position cible souhaitée change en temps réel (figure 6).
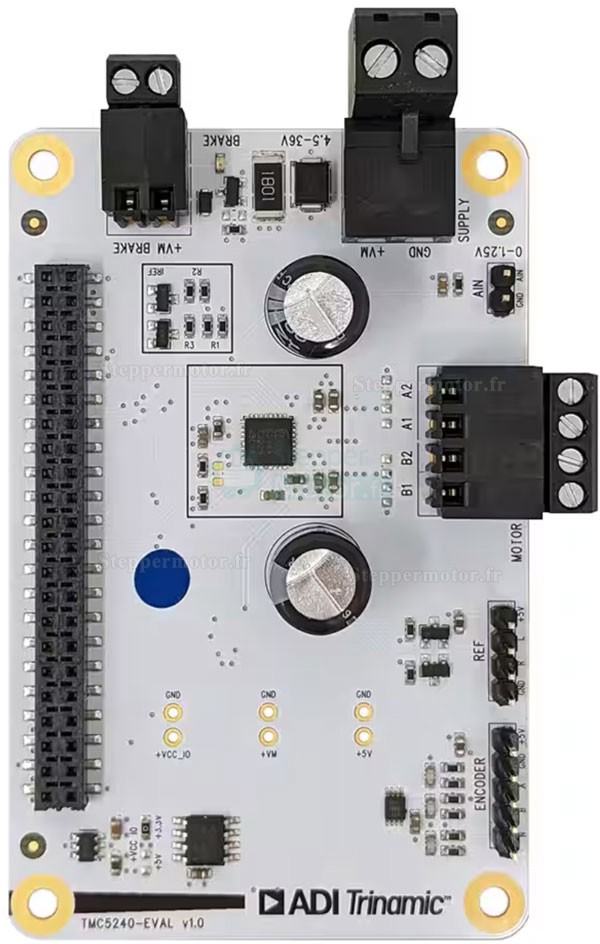
Figure6 : Le contrôleur TMC5240 fournit une rampe à huit points qui prend en charge les changements de position de la cible en temps réel pour des transitions de mode en douceur.
Compte tenu de la flexibilité, de la polyvalence et de la sophistication de ce circuit intégré de commande, la carte d'évaluation TMC5240-EVAL est devenue une aide très appréciée (figure 7). Elle utilise le schéma standard du circuit intégré et propose plusieurs options dans le logiciel qui permettent aux concepteurs de tester différents modes de fonctionnement.
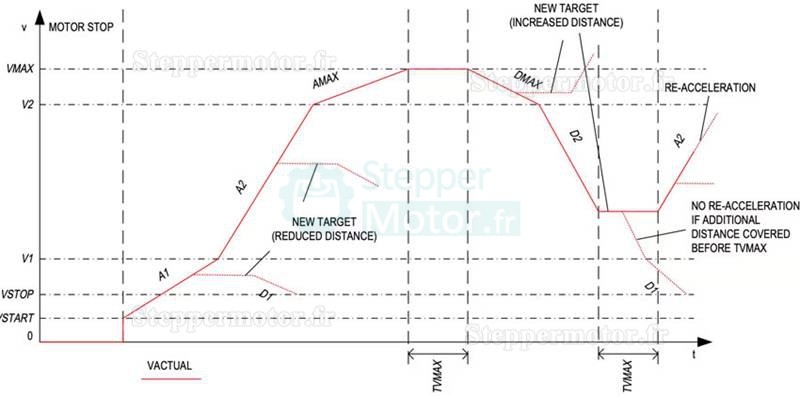
Figure 7 : En utilisant la carte d'évaluation TMC5240-EVAL et l'interface graphique associée, les concepteurs peuvent étudier et affiner les performances du TMC5240 pour des combinaisons spécifiques d'actionneurs et de charges.
Pour les concepteurs ayant des besoins d'évaluation et de conception moins complexes, Analog Devices propose également le TMC5240-BOB, une carte d'interface IC de base qui connecte les broches physiques du TMC5240 à une rangée d'en-têtes accessible à l'utilisateur.
Résumé
L'ajout d'intelligence aux pilotes de solénoïdes et de moteurs pas à pas permet d'améliorer le contrôle et la détection des défauts, de prendre des décisions en temps réel et de communiquer avec des systèmes de contrôle de niveau supérieur ou des systèmes de productivité basés sur l'intelligence artificielle. Avec des pilotes hautement intégrés tels que le MAX22200 et le TMC5240 d'Analog Devices, les utilisateurs peuvent rapidement mettre en œuvre des algorithmes avancés pour optimiser les performances des moteurs solénoïdes et pas à pas pour des applications spécifiques.